

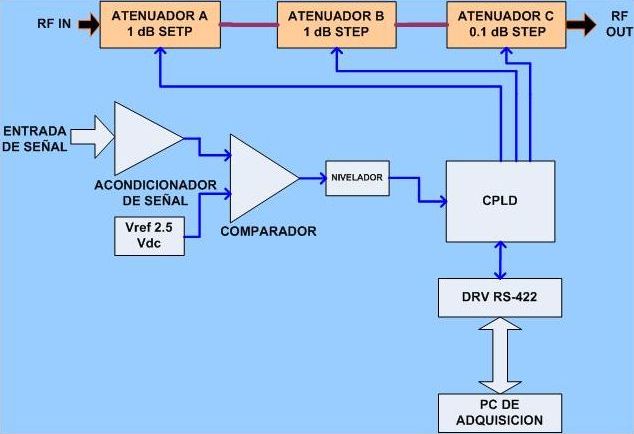
Fig. 1: Diagrama básico del hardware utilizado
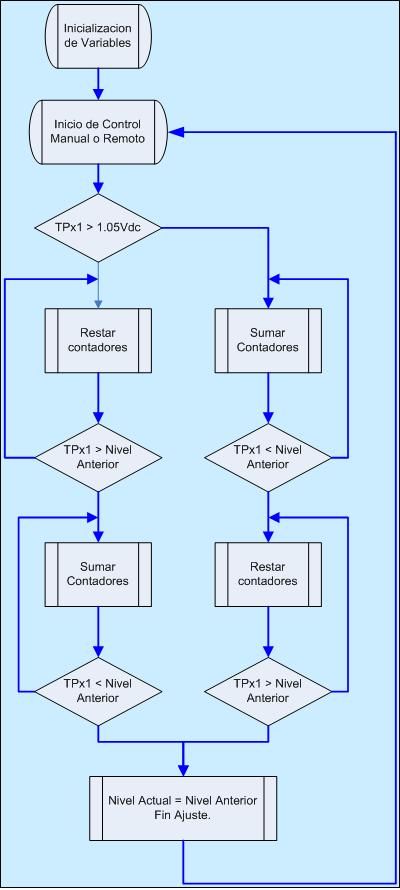
Fig. 2: Diagrama funcional

Fig. 3: Simulación de un ciclo de control
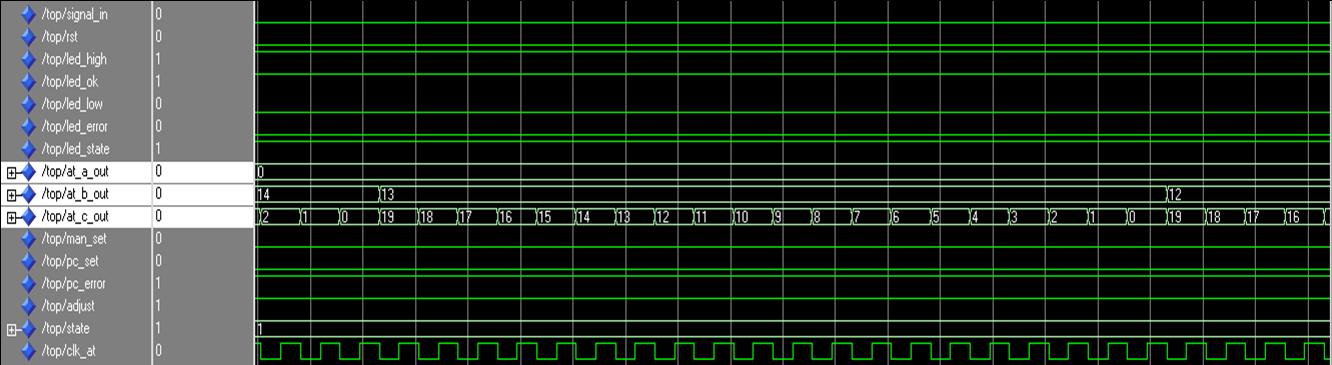
Fig. 4: Simulación de recorrido del atenuador de menor paso.
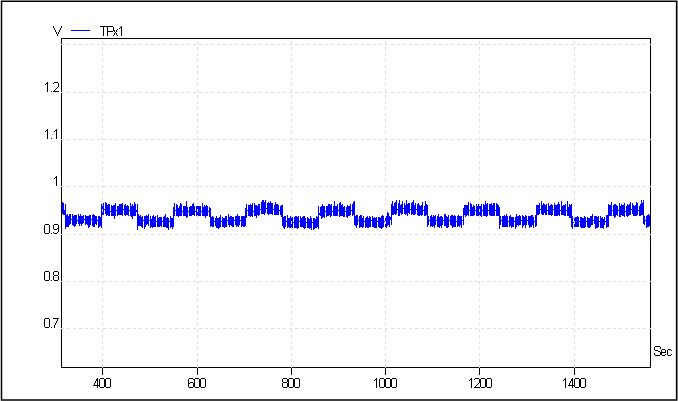
Fig. 5: Medidas del CAG durante una observación
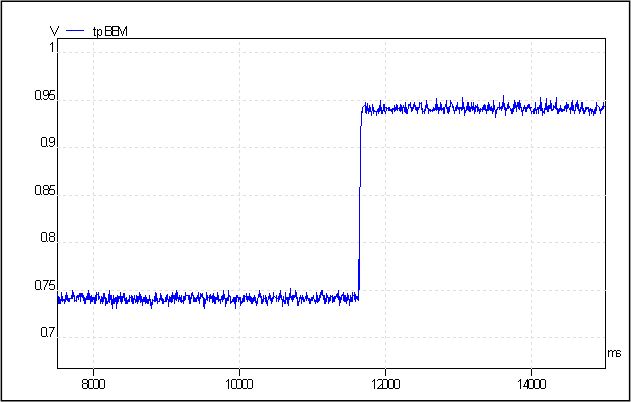
Fig. 6: Detalle de un salto de control.
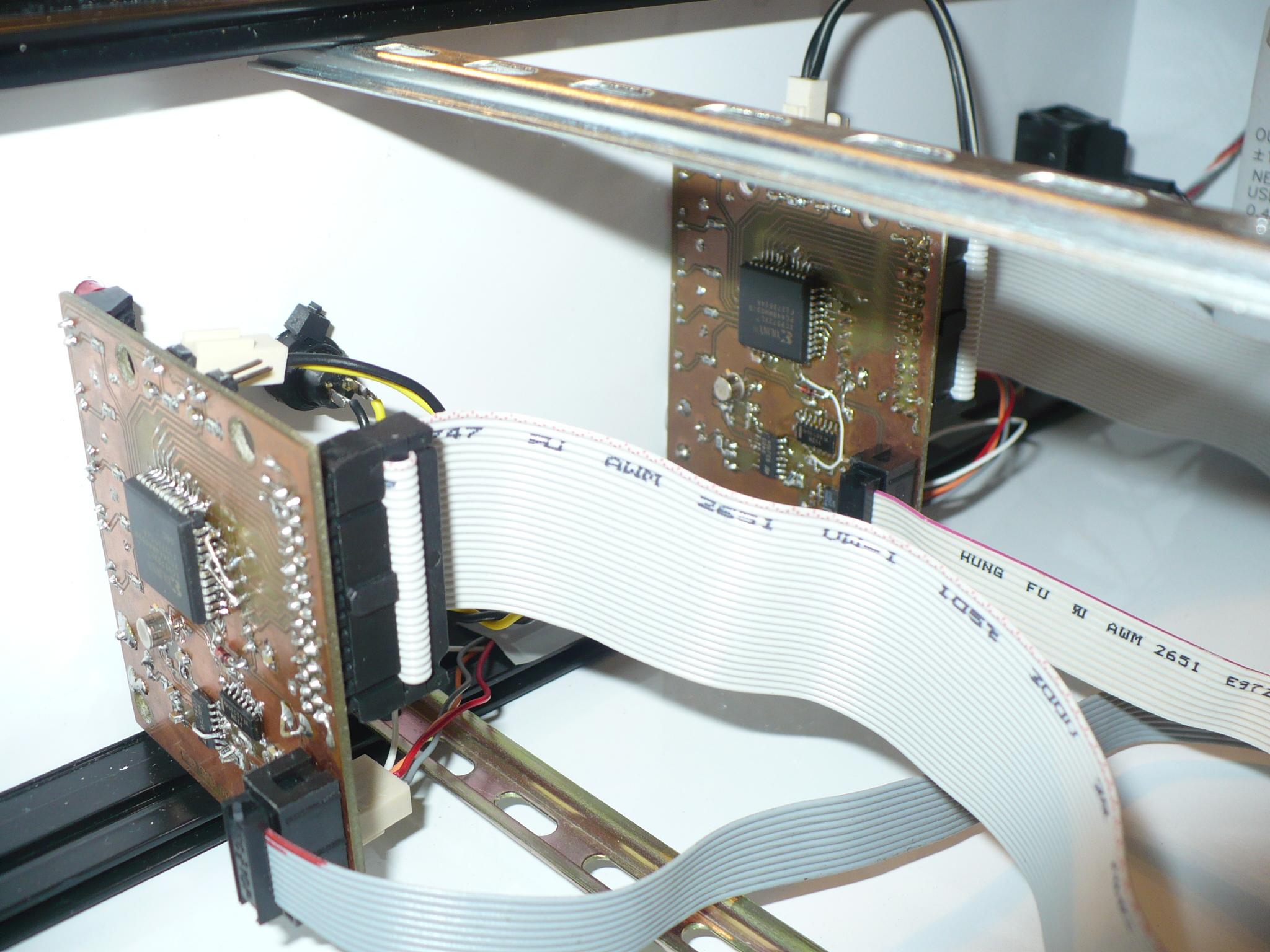
Fig. 7: Placas de control digital

Fig. 8: Equipo CAG y mezclador de banda base
Control Automático de Ganancia sobre un CPLD
El I.A.R. cuenta con dos antenas parabólicas de 30mts de diámetro para uso radioastronomico. Una de ellas utiliza un receptor criogénico refrigerado a 15ºK (-258ºC) operando en una frecuencia central de 1420Mhz(HI). Estas pequeñas señales de radio, deben ser acondicionadas a niveles de potencia predeterminados por la configuración utilizada por el receptor, es por ello necesario que un módulo sea responsable del control automático de ganancia (C.A.G.) del sistema.
El equipo de adquisición basado en un Auto-Correlador (ACO) de 1024 canales, requiere que la señal observada al inicio de cada integración (o tiempo de adquisición) este alternando por arriba y debajo de una señal de referencia fija, al mismo tiempo una etapa previa de filtrado puede seleccionar entre varios canales con diferentes anchos de banda que van desde 1.25Mhz hasta 10Mhz. Para lograr este grado de control sobre la potencia requerida a la entrada del ACO, se utilizan una serie de atenuadores de radiofrecuencia (RF) con control digital, logrando un paso mínimo de 0.1dB y una excursión total de 45dB.
 Diseño C.A.G.
Diseño C.A.G.
Para el diseño del hardware del CAG se utilizo un esquema sencillo donde se dividió el Hardware en cuatro etapas:
- Analógica
- Digital
- Comunicación
- Radiofrecuencia (RF)
- Analógica
- Digital
- Comunicación
- Radiofrecuencia (RF)
La etapa analógica recibe una señal de control externa a la cual se le realiza un acondicionamiento de señal, luego realiza una comparación analógica utilizando una señal interna de referencia estable y genera un nivel digital indicando si la entrada esta sobre o debajo la referencia interna.
La etapa digital toma este valor y en función del ciclo de operación realiza el ajuste para ubicar la señal por arriba o debajo de la referencia controlando así los diferentes atenuadores digitales.
La etapa de comunicación utiliza "drivers" RS-422 para recibir comandos de la PC de adquisición y enviar señales de alarma.
La etapa de RF esta formada por 3 atenuadores de RF controlados digitalmente, dos con pasos de 1dB y uno con pasos de 0.1dB.
Como núcleo de la etapa digital se utilizo un CPLD de la firma XILINX® modelo XC9572, realizando en este un "firmware" desarrollado en VHDL. (Ver Fig. 1)
Desarrollo VHDL
El código VHDL se dividió en funciones reducidas para realizar los "tes-tbench" de forma más eficiente; estas funciones se separaron en:
- Interfase usuario
- Control externo
- Control de atenuadores digitales
- Interfase usuario
- Control externo
- Control de atenuadores digitales
Cada módulo en VHDL fue desarrollado utilizando las herramientas de desarrollo de la firma Xilinx®.
El módulo encargado de realizar los ajustes es el "Control de atenuadores digitales", para realizar el control de forma eficiente para la adquisición del ACO el modulo debe al iniciar la medida, en función de la señal de entrada, posiciona los atenuadores de forma tal que crucen el umbral de la referencia, guardando esta información de manera que, al siguiente ajuste o inicio de observación, sin importar donde se encuentre la señal de entrada en ese instante, esta quede de forma alternada sobre o debajo del nivel de referencia.
Es decir, en cada ajuste la señal debe estar en la poción opuesta al valor del ajuste anterior. (Ver Fig. 2)
Simulación
Para la simulación se utilizo el software Modelsim®, realizando diferentes scripts de simulación para evaluar las diferentes condiciones de funcionamiento, en general se evaluó un ciclo de funcionamiento normal de varios minutos de duración y ciclos de recorrida completa de los atenuadores, simulando también el control manual o remoto. (Ver Fig. 3 y 4)
Mediciones
Una vez realizadas las simulaciones y la construcción de un modelo de ingeniería, se realizaron las medidas realizando una serie de observaciones, con esto se comprueba el funcionamiento del instrumento una vez integrado a la cadena del receptor, el control del equipo se realiza desde la PC que contiene el software de adquisición del Autocorrelador. (Ver Fig. 5 a 8)
Conclusión
Se presento el desarrollo de un modulo para ser integrado a la cadena receptora de un instrumento para radioastronomía, este equipo debía responder a ciertos requerimientos, para ello se realiza una propuesta, se realizan una serie de simulaciones para validar su operación, luego se procede con el armado y se realizan pruebas con el equipo integrado, las cuales responden al modelo esperado.
Autor:Guillermo Gancio --> ggancio -at- iar.unlp.edu.ar
